| Similarities Between Different Versions | Installation Methods | Same,Compatible | |||||||||
| Hollow Bore Diameter | 18mm | ||||||||||
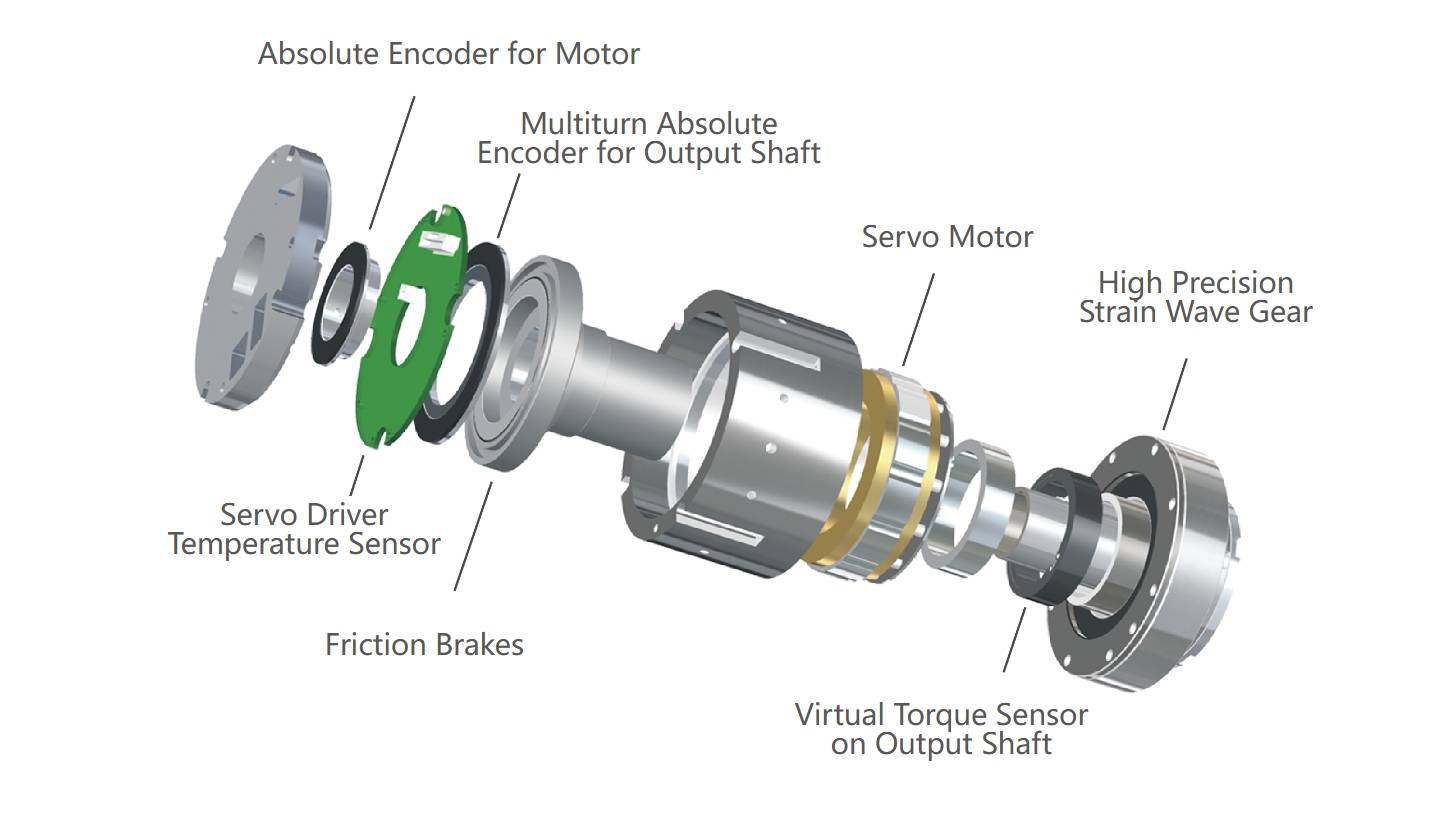
| Precision | Repeatability/Absolute Accuracy: ±7/±15 arc sec or ±10/±25 arc sec* | ||||||||||
| Electrical Interface | Communication Protocol:EtherCAT/CANopen/Modbus,Output-side Encoder Resolution:19/20Bit | ||||||||||
| Strain wave gear-ratio | 20-50 | 20-80 | 20-100 | 20-120 | |||||||
| Peak torque for start and stop(Nm) | 73 | 96 | 107 | 113 | |||||||
| Permissible max.value at average load torque(Nm) | 44 | 61 | 64 | 64 | |||||||
| Rated torque(Nm) | 33 | 44 | 52 | 52 | |||||||
| Permissible maximum momentary torque(Nm) | 127 | 165 | 191 | 191 | |||||||
| Max. output rotational speed(RPM) | 60 | 37.5 | 30 | 25 | |||||||
| Motor power(W) | 100 | ||||||||||
| Power Input Voltage(V) | |||||||||||
| 48V(±10%)
Please make sure to read “Comparison of Switching Power Supply and ePower” and the “eRob Rotary Actuator User Manual” Chapter 3, for clear instructions on powering the eRob module.
|
|||||||||||
| Version | V3 | V6 | |||||||||
| SWG Output Side Inertia(g-mm2) | 297466 | 273391 | |||||||||
| SWG Output Side Mass(kg) | 0.36 | 0.321 | |||||||||
| Without Brake | SWG Input Side Inertia(g∙mm²) | 139067 | 95791 | ||||||||
| SWG Input Side Mass(kg) | 0.41 | 0.257 | |||||||||
| OD * Length(mm) | Φ90×98.9 | Φ90×75.9 | |||||||||
| Total Mass(kg) | 1.75 | 1.506 | |||||||||
| With Brake | SWG Input Side Inertia(g∙mm²) | 147025 | 110213 | ||||||||
| SWG Input Side Mass(kg) | 0.43 | 0.292 | |||||||||
| OD * Length(mm) | Φ90×98.9 | Φ90×75.9 | |||||||||
| Total Mass(kg) | 1.87 | 1.639 | |||||||||
| Common parameters | ID:18mm, IP grating:IP54, Brake model:friction brake | ||||||||||
| Optional device | Communication type:EtherCAT/CANopen/Modbus; Output encoder resolution:19Bit,Repeatability/Accuracy:±7/±15 arc seconds or ±10/±25 arc seconds. |
||||||||||