| Vehicle locking distance | 800mm |
| Man locking distance | 400mm |
| Lens | 6mm |
| Resolution | 2560×1440 |
| FOV | 66°*40° |
| Min. tracking pixel size | 5*5pixelMax. tracking speed |
| Max. tracking speed | 90km/h |
| Al guidance mode operation | Central locking, supporting multiple corrections |
| Supply voltage | 9V~16V |
| Power | 2W |
| Video input/output | PAL-system output |
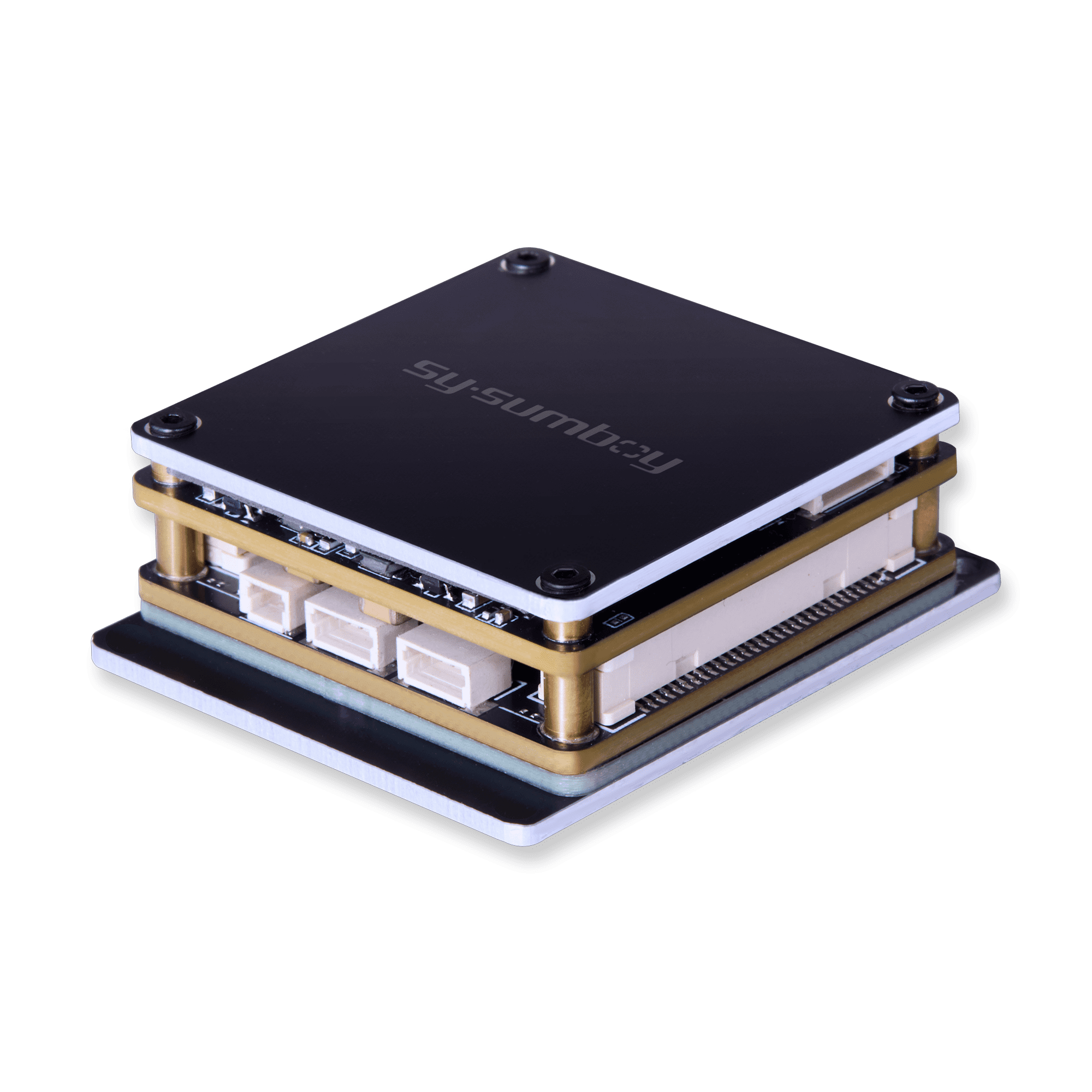
| Core size | 38*38*10mm |
| External dimensions | 47*38*15mm |
| Chip weight | 37g |
| Camera weight | 8g |
| Frame rate | 60Hz |
| Latency | <5ms |
| Min.contrast | 5% |
| Min.target pixel | 5*5~128*128pixel |
| Tracking algorithm | 60HZ |
| Zoom | 3x digital |
| Protocols | CRSF/Sbus/MavLinkv2 |
| Frimware | Beta Flight/INVA/APM/PX4 |
| Navigation and positioning | Support strikes with or without positioning information |